
另外,与上个版本相比3DF Zephyr 5的速度明显快于以前所有的版本,并且重建的质量现在显着提高了,可以给用户们带来更好的使用体验,那么其中都更新了什么内容呢?其中分享了新的核心算法允许在最大分辨率下处理大量数据集,还有新的光一致性滤镜可分享更美丽,更逼真的锐利边缘,但这都不是重点,重点是现在拥有更低的内存占用空间,并分享了更多的技术支持和改进。
ps:本次为用户们分享的是3DF Zephyr 5中文破解版,附带了相对应有效的破解补丁,可以轻松为大家免费激活软件所有功能,亲测有效,欢迎感兴趣的用户下载体验。
3DF Zephyr5破解版安装教程
1、下载解压,得到3DF Zephyr 5源程序和破解补丁;
2、首先运行3DF+Zephyr+v5.000+(x64).exe,选择简体中文;
3、阅读并且同意条款,然后继续安装;
4、选择软件安装路径,默认即可;
5、选择附加任务,建议勾选创建快捷方式;
6、等待安装完成,先不要运行软件,点击完成退出引导;
7、将Brains破解补丁中的文件复制到软件根目录下替换;
【默认路径C:\Program Files\3DF Zephyr】
8、至此,3DF Zephyr 5中文破解版就成功安装激活好了,所有功能全部免费使用。
3DF Zephyr5新功能
1、改进技术知识兔始终致力于研究和开发,最新版本也不例外,因为知识兔在知识兔最先进的摄影测量管道的每个重建步骤中都提高了速度和准确性。 许多其他优化和新工具使Zephyr成为您可信赖的3D重建软件解决方案。
2、3DF Zephyr Free
现在可以下载一个全新的免费版本! 非常适合学习或作为观看者,也是与客户共享.ZEP文件的好方法。 3DF Zephyr Free可以打开使用任何3DF Zephyr版本生成的.ZEP文件。
3、改进了互操作性
Zephyr最近改进了对激光扫描技术的支持,改进了点云管理和结构化工具。该版本软件仍然是完整的摄影测量软件包,可以从摄影测量和激光扫描世界中获得最佳效果。
4、随时准备生产
与往常一样,此更新还包含许多新工具和对知识兔工作流程的改进。 3DF Zephyr5是完整的摄影测量软件套件,快速可靠。
5、更快的处理
整个管道得到了很大的改进,并且在运动结构,多视图立体声和网格化阶段期间处理时间得到了显着改善 - 所有这些都提高了准确性。
6、改进的工具
此更新集成了许多小修复和改进,其中包括更好的选择工具,更好的Gizmo,快速项目向导以及更多等待您的用户友好界面,您都知道和喜爱!
7、 FlowEngine C ++ SDK
知识兔的C ++ SDK的新版本FlowEngine现在可用于Microsoft Windows和GNU / Linux平台(与vfx平台100%兼容)。你知道吗还有一个免费的SDK版本,限量50张照片,这是知识兔的3DF Zephyr免费版的完美伴侣吗?
8、摄像机校准管理器
经常在旅途中?使用这个方便的工具从知识兔的服务器预先下载相机校准,只需上传JPG并将其存储离线供以后使用。
9、预设管理器
您现在可以通过用户友好的方式直接从Zephyr轻松共享和下载预设。只需插入预设ID,让zephyr从知识兔的服务器下载。
10、对OBJ和FBX格式的四重支持
您现在可以在重新导入网格以重新纹理时分享西风四边形。
软件特点
1、适用于任何相机和无人机2、原生激光扫描支持
3、导出点云,网格和纹理
4、DEM,配置文件,真正的正射影像和正交镶嵌
5、CAD绘图,轮廓线生成,地理配准
6、用于屏蔽,选择和编辑的专业工具
7、点云和网格过滤器
8、测量(距离,面积,体积,角度)
9、以所有最常见的文件格式导入/导出
0、编码目标支持
10、你的永远:没有隐藏的费用或经常性的计划
3DF Zephyr教程
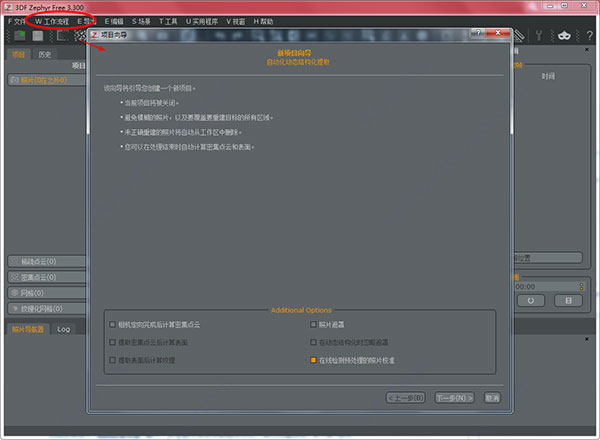
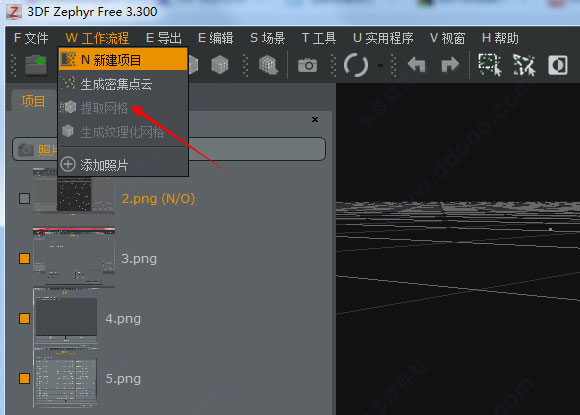
许多人都不知道该软件应该怎么用,因此知识兔小编详细的为大家分享整理了3df zephyr 中文版教程以供参考:1、要创建一个新项目,请点击【工作流程】选项,进入新建项目向导页面,如下图所示:
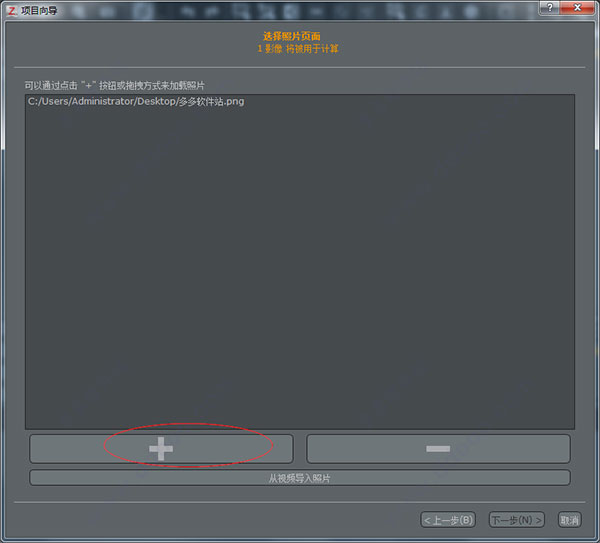
2、选择照片页面
点击“+”加载照片(支持拖拽方式),“-”可删除照片,3DF Zephyr同时支持从视频导入照片文件
3、相机校准页面
将相机校准参数(如果可用)分配到已加载的照片

4、相机定向
选择您的重建类型和所需的预设,类别包括:航拍、近景、人体、城市;预设包括:默认、深度、详尽

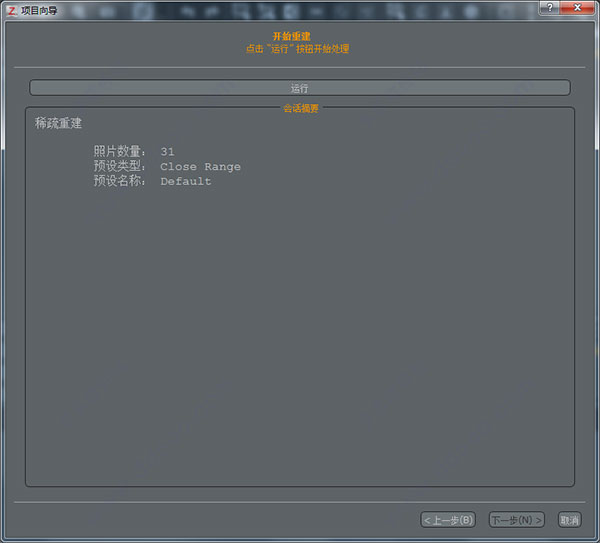
5、考试重建
点击“运行”按钮开始处理
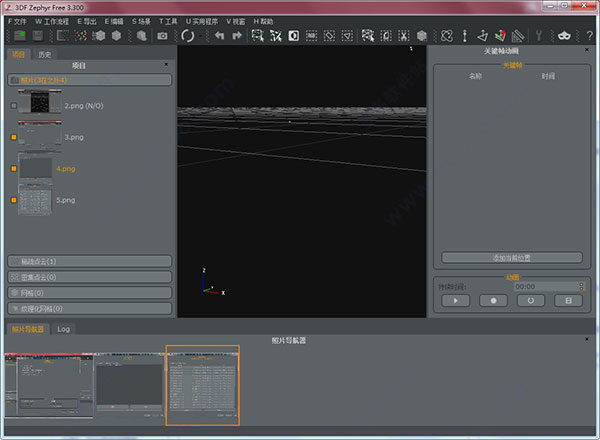
6、创建成功
稍等片刻即可看到一个 “重新成功!“对话框,没有问题,点击右下角的“完成”即可

7、移动
默认情况下,您可以在轨道视图模式下导航场景:将鼠标光标悬停在场景上按住左键,然后移动鼠标环顾四周。放大/缩小只需使用鼠标滚轮即可。您也可以通过按住左侧控制并移动鼠标光标来平移视图。
Zephyr分享三种导航系统,可以使用各自的图标或场景>相机子菜单进行选择。
具有枢轴的轨道视图模式与轨道视图模式完全相同,但是,枢轴不是重建的中心,而是每次在光标位置上的模型上拾取。
免费看模式使用经典的第一人称射手WASD键; 按住鼠标左键并移动鼠标可以旋转相机,“q”和“e”键可以分别上下移动。
您还可以通过右键单击相机,然后单击“移动到此”或使用屏幕底部的相机导航器,快速移动到相机位置。
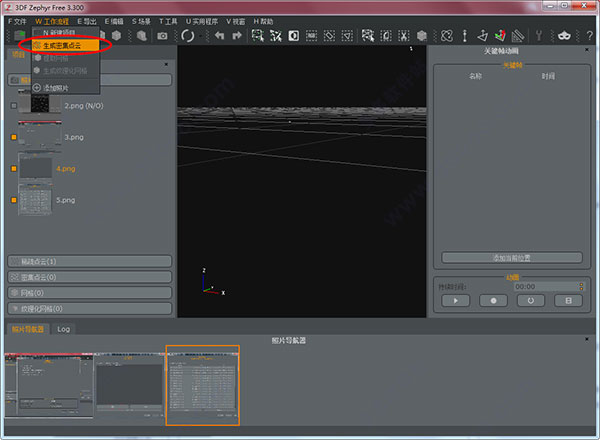
8、生成密集点云
现在摄像机定位,知识兔可以提取知识兔的3D模型的密集点云。这一次,从“工作流”菜单中选择密集云生成。该“密集点云生成向导”会出现,点击“下一步”,在屏幕的右下角。
在这个阶段,3DF Zephyr将计算深度图并提取密点云。
这些设置可以显著改变输出的质量以及所需要的计算时间和每个环节都能在高级窗口进行调整,但现在只需再次离开预设关闭范围/默认值 ,然后单击“下一步”,在右下屏幕的角落点击“运行”开始密点提取(第二阶段的计算以创建3D网格)。
一旦稠密点云生成完成,单击完成继续到步骤6,知识兔将能够提取网格。
9、网格提取
要开始网格生成过程,只需单击“工作流”,然后单击“ 网格提取”。
将出现“网格生成向导”窗口。
由于工作区能够保存多个点云,因此知识兔必须选择知识兔将用于网格提取的哪一个。由于知识兔只有一个,知识兔可以简单地点击“ 下一步 ”进入“ 表面重建页面 ”。
再一次,您可以随时窥探高级设置,并再次选择预设“ 关闭范围/默认值 ”,然后单击 窗口右下角的“下一步”。
要启动网格创建,只需单击“运行”按钮:当出现“网格创建成功”对话框时,只需单击窗口右下角的“完成”即可
10、生成文理化网格
一旦网格生成,每个顶点将保存颜色信息。这对于某些应用程序来说可能会很好,但通常也需要一个纹理。在Zephyr中,这是单独的步骤,其接收在步骤6a中生成的网格的输入。
要开始纹理生成过程,只需单击“工作流”,然后单击“纹理网格生成”。将出现纹理网格生成窗口。
选择以前生成的网格,如果需要,可以根据所需的输出调整设置。
请注意,颜色贡献将根据每个三角形的最大相机数量以及可用于更清晰和更清晰边框的多频带设置而有所不同。
建议您每个三角形留下1个摄像头并启用使用色彩平衡。自Zephyr 2.0以来,此功能将自动修复照明问题,并为每个点选择最佳颜色。如果您希望(甚至配合色彩平衡),您仍然可以使用多个摄像头,但是在大多数情况下,最佳效果可以通过1作为“每个图像的最大摄像机数”,多频带禁用和使用启用色彩平衡。
单击“下一步”开始纹理网格生成。
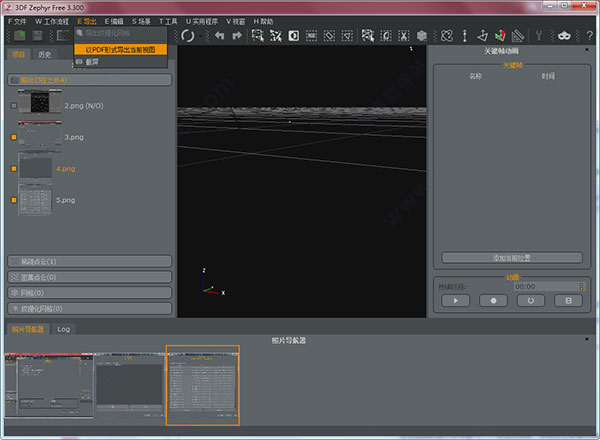
11、导出最终的网格
要导出生成的纹理网格,只需点击“导出菜单” ,然后在“导出纹理网”: 在“网出口窗口” 将出现。
3DF Zephyr允许您以最常用和最常用的文件格式导出。随着开发的进行,可能会支持新的文件格式,所以重要的是保持3DF Zephyr是最新的。
根据所选择的文件格式,可以使用不同的选项。作为一个独立的3D模型查看器,您可以使用您选择的程序(例如,Meshlab)。
准备导出后,只需点击网格导出窗口右下角的导出按钮即可。
功能介绍
1、设计像您一样,由建筑师开发的领先的建筑信息建模软件可以释放您的创造力。算法设计工具和大型模型支持使您可以做自己最擅长的事情:设计出色的体系结构。
2、分析
花时间设计伟大的建筑物-不用担心模型的质量。通过将Archicad与市场上最好的分析工具结合在一起,您将在设计的最早阶段识别并解决问题。所有这些加在一起,使设计更加准确,易于构建,且运营成本更低。
3、合作
与各地或世界各地的团队合作处理任何规模或复杂性的项目。实时即时消息传递,不再需要等待。无论其他软件团队成员正在使用什么,冲突检测和解决都是快速而轻松的。
4、文件
完整的“开箱即用”文档集,以及符合本地BIM要求的强大发布工作流程,意味着您可以专注于设计而不是文书工作。
5、可视化
利用Archicad的内置建筑可视化软件面板,使您的模型栩栩如生。知识兔的VR和渲染工具旨在帮助任何人理解和导航BIM模型。理解模型意味着可以在早期设计阶段做出决策和更改,从而节省时间,金钱和建筑工地。
系统要求
3DF Zephyr 5是在Windows环境中运行的独立应用程序。请注意,该软件是一个对计算要求很高的应用程序,因为它利用了所有可用的CPU内核,并且利用了可用的Nvidia Cuda技术。因此注意,启用CUDA的视频卡可以大大提高性能。【最低系统要求】
操作系统:Windows 10 / 8.1 / 8 64位
处理器:双核2.0GHz或同等处理器
内存:16GB系统RAM
硬盘空间:10GB可用硬盘空间
视频卡:兼容Direct X 9.0c的视频卡,其中256MB内存
【推荐系统要求】
操作系统:Windows 10 / 8.1 / 8 64位
处理器:四核Intel或AMD CPU
内存:32GB系统RAM
硬盘:20GB可用硬盘空间– SSD驱动器
视频卡:具有2GB RAM和Cuda功能的NVIDIA视频卡> = 3.0
更新日志
3DF Zephyr 5更新日志*介绍3DF猩红色!一个新的专用独立软件,专门设计用于激光扫描数据注册(与3DF Zephyr捆绑在一起)
*核心网格之外的处理
*显着提高了SfM的准确性和速度
*WIC现在是默认的成像引擎
*合并工作区的改进(现在可以指定要合并的元素)
*向绘图元素添加了样条线(仅3DF Zephyr)
*现在将光一致性计算分成块以最大程度地减少内存使用量
*提高光一致性速度
*现在将纹理计算分成块以最小化内存使用量
*在光一致性中添加了边缘滤镜计算。
*纹理改进和三角形的更好管理,而无需有效地重新投影。
*新的深蓝色皮肤
*新的3DF Zephyr徽标
*添加了法语翻译
*添加了土耳其语翻译
*在Gizmo上添加了枢轴支持
*用户现在可以在批处理中设置CRS,并可以快速进行项目向导对话框(仅3DF Zephyr)
*添加了全分辨率图像加载渲染显示视图
*现在压缩了Zephyr缓存以最大程度地减少磁盘使用
*用户现在可以指定其他自动保存文件夹
*用户现在可以在分解工具中指定自定义视野
*改进的Fls,ZF和Riegl本机激光扫描文件支持
*Revit插件已更新
*更快的渲染
*现在将zep文件移动到另一个位置时,可以更好地消除重复的摄影机名称的歧义
*改进了点检查工具
*用户现在可以从工作区中的任何平面折线定义网格和点云的选择
*添加了“克隆并使结构化”的命令
*标记检测期间暴露的完整参数
*为假面舞会添加的蒙版反转
*假面舞会自动魔术按钮
*将正射影像导出为pdf时提高了分辨率
*修复了在极少数情况下在表面计算期间导致死锁的问题
*改善了水平曲线
*现在可以在项目向导中添加整个文件夹
*添加了导入带有UV贴图的网格时转移纹理网格(而不是重新计算)的可能性
*修复了对大型数据集和可变参数进行束调整的问题
*修复了导入点少的点云时崩溃的问题
*修复了使用致密的网格增强器工作流时发生的崩溃
*修复了标记检测和不稳定的三角剖分的问题
*修复了导入用于重纹理化的四边形网格时缺少三角形的问题
*修复了SCR上的导出(提高了精度)
*修复了Cuda期间的崩溃启动时检查
*修复了与关键点动画有关的崩溃
*修复了立体声点云合并期间的崩溃
*您是否真正阅读了所有变更日志?这次非常大,知识兔没有报告很多……
特别说明
提取码:kc2q>下载仅供下载体验和测试学习,不得商用和正当使用。
下载体验